Humanoid G1



| Hình ảnh | |||||||
| Model | G1 Basic | G1 Edu Standard-U1 | G1 Edu Plus-U2 | G1 Edu Ultimate A-U3 | G1 Edu Ultimate B-U4 | G1 Edu Ultimate C-U5 | G1 Edu Ultimate D-U6 |
| Kích thước đứng | 1320mmx450mmx200mm | ||||||
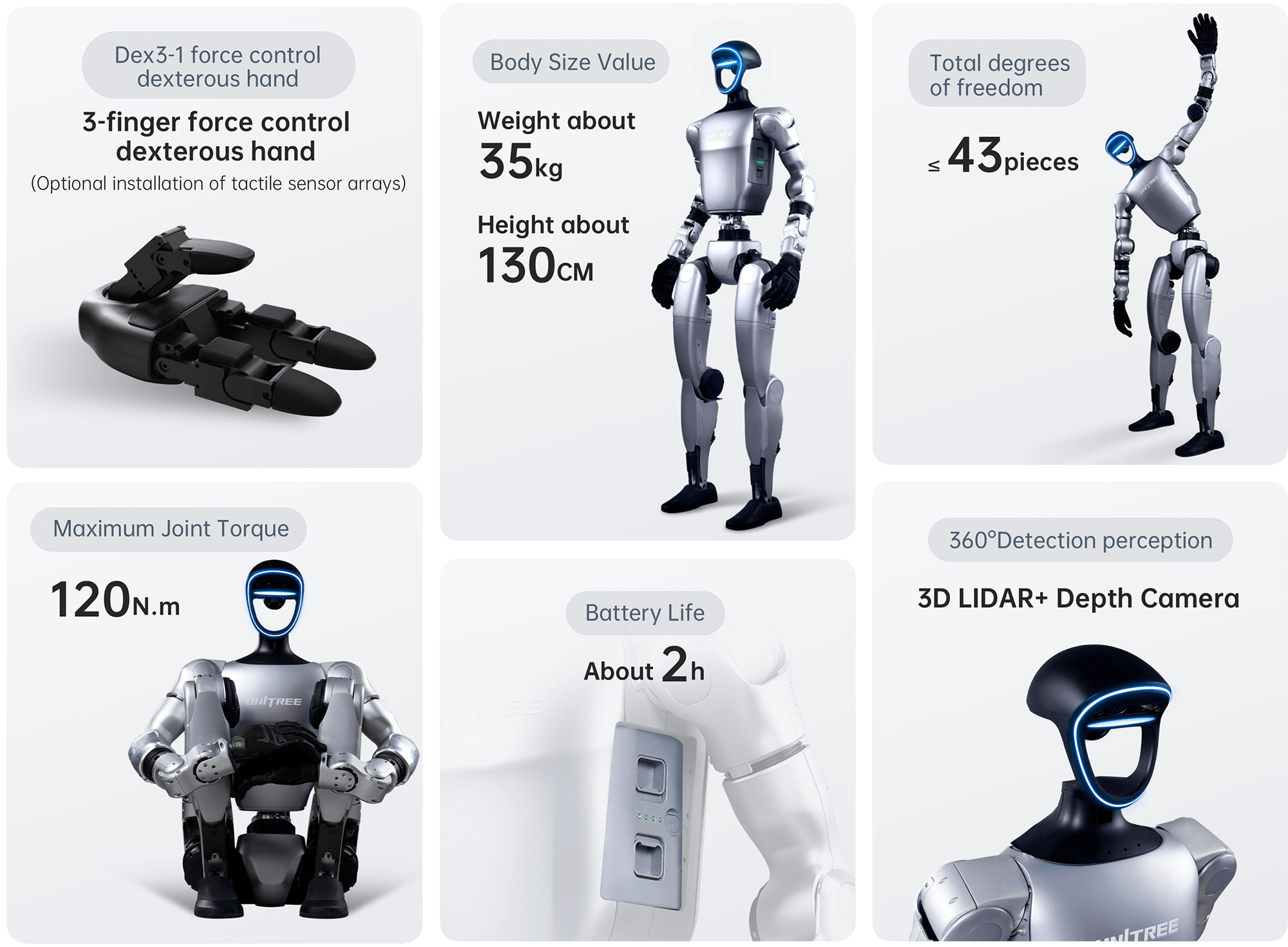
| Cân nặng | Khoảng 35kg+ | ||||||
| Chất liệu | Hợp kim nhôm + Nhựa chịu lực | ||||||
| Năng lực tính toán cơ bản | 8-core High-performance | ||||||
| Năng lực tính toán nâng cao | NVIDIA Jetson Orin hỗ trợ 100 TOPS (100 nghìn tỷ phép tính/giây) | ||||||
| Nâng cấp OTA | • | • | • | • | • | • | • |
| Số khớp tự do | 23 | 29 | 43 | 41 | |||
| Số bậc tự do của 1 chân | 6 | ||||||
| Số bậc tự do của eo | 1 | 3 | |||||
| Số bậc tự do của 1 cánh tay | 5 | 7 | |||||
| Bàn tay | Bàn tay 3 ngón Dex3-1 với 7 bậc tự do | Bàn tay 3 ngón Dex3-1 với 7 bậc tự do, tích hợp 33 cảm biến xúc giác | Bàn tay 5 ngón RH56DFQ với 6 bậc tự do | Bàn tay 5 ngón RH56DFTP với 6 bậc tự do, tích hợp 17 cảm biến xúc giác | |||
| Mô-men xoắn cực đại khớp gối | 90N.m | 120N.m | |||||
| Tải trọng cánh tay | Khoảng 2kg | Khoảng 3kg | |||||
| Chiều dài chân | 0.6m | ||||||
| Sải tay | Khoảng 0.45m | ||||||
| Vòng bi đầu ra của khớp | Vòng bi lăn chéo loại công nghiệp (độ chính xác cao, khả năng chịu tải cao). | ||||||
| Động cơ khớp | Động cơ đồng bộ nam châm vĩnh cửu (PMSM) loại rô-to trong, có quán tính thấp và tốc độ cao, tản nhiệt tốt | ||||||
| Phạm vi chuyển động của các khớp lớn | Khớp eo:Z±155° Khớp gối:0~165° Khớp hông:P±154°、R-30~+170°、Y±158° |
Khớp eo:Z±155°、X±45°、Y±30° Khớp gối:0~165° Khớp hông:P±154°、R-30~+170°、Y±158° Khớp cổ tay:P±92.5°、Y±92.5° |
|||||
| Kết cấu khớp rỗng để đi dây hoàn toàn bên trong | • | • | • | • | • | • | • |
| Hệ thổng tản nhiệt | Tản nhiệt khí cục bộ | ||||||
| Joint Encoder | Dual + single encoder | ||||||
| Camera | Binocular Camera | ||||||
| Microphone | 4-Mic Array | ||||||
| Speaker | Stereo, 5W Power | ||||||
| Wi-Fi 6 | • | • | • | • | • | • | • |
| Bluetooth 5.2 | • | • | • | • | • | • | • |
| Phát triển thứ cấp | • | • | • | • | • | • | • |
| Tay cầm điều khiển | • | • | • | • | • | • | • |
| Pin thông minh | 9000mAh | ||||||
| Thời lượng pin | 2h | ||||||
| Bộ sạc | 54V 5A | ||||||
| Bảo hành | 8 tháng | 18 tháng | |||||



















